反向动力学
一、前言
对于一般的动画,引擎会读取动画文件中的数据,然后将这些数据设置到模型骨架对应的关节上,在这个过程中,子关节的位置会根据父关节的位置和旋转来改变,这是一个从根部到末端的过程。一般我们称为正向动力学(FK)。
而反向动力学(IK)则是一个相反的过程,开发者只需要设置末端节点的位置,引擎会自动计算其它节点的旋转和位置。
相较于正向动力学(FK),反向动力学(IK)更加灵活,例如一个角色要移动手臂,使用正向动力学(FK)需要制作一个动画文件,如果想要手臂移动到其它位置,就需要再制作一个动画文件,如果角色的手臂要到达随机的位置,使用正向动力学(FK)就很困难,因为开发者不可能制作无限多的动画;而使用反向动力学(IK)则没有这样的问题,无论角色的手臂要到达哪里,开发者只需要设置手掌的位置即可,引擎会自动计算出小臂,大臂等节点的位置。
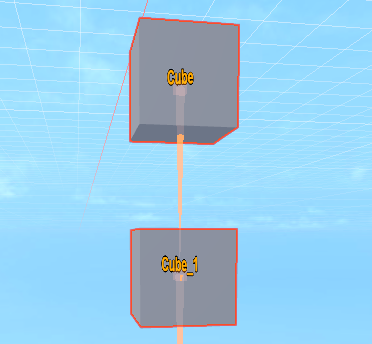
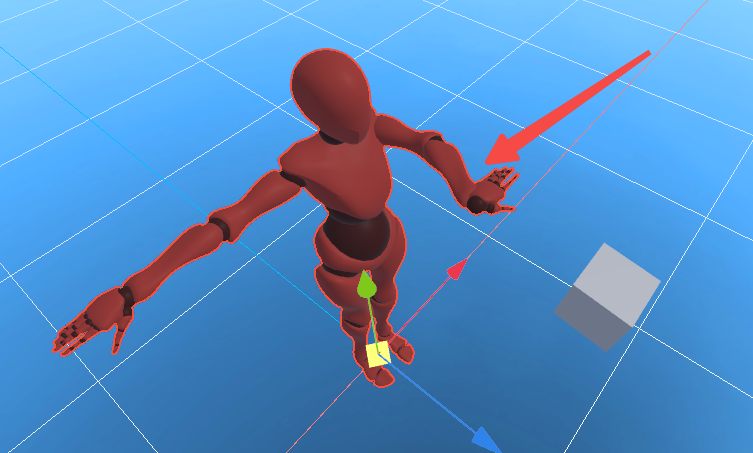
可以看到,在移动cube节点后,角色的手臂跟随cube移动。
二、创建ChainsIK
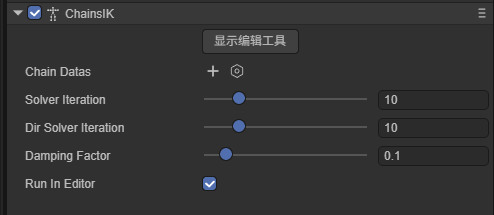
选中一个节点,在属性设置面板中点击增加组件,在动画选项中就可以找到ChainsIK。
ChainsIK组件可以添加在任意3D节点上,对于节点层级没有特殊要求。开发者使用方便即可。添加好的组件如图所示。
三、ChainsIK的属性
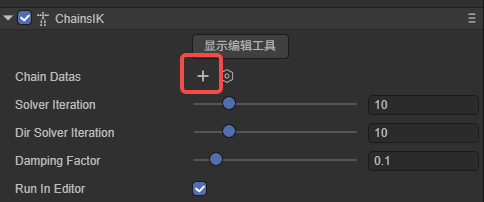
3.1 创建Chain Datas
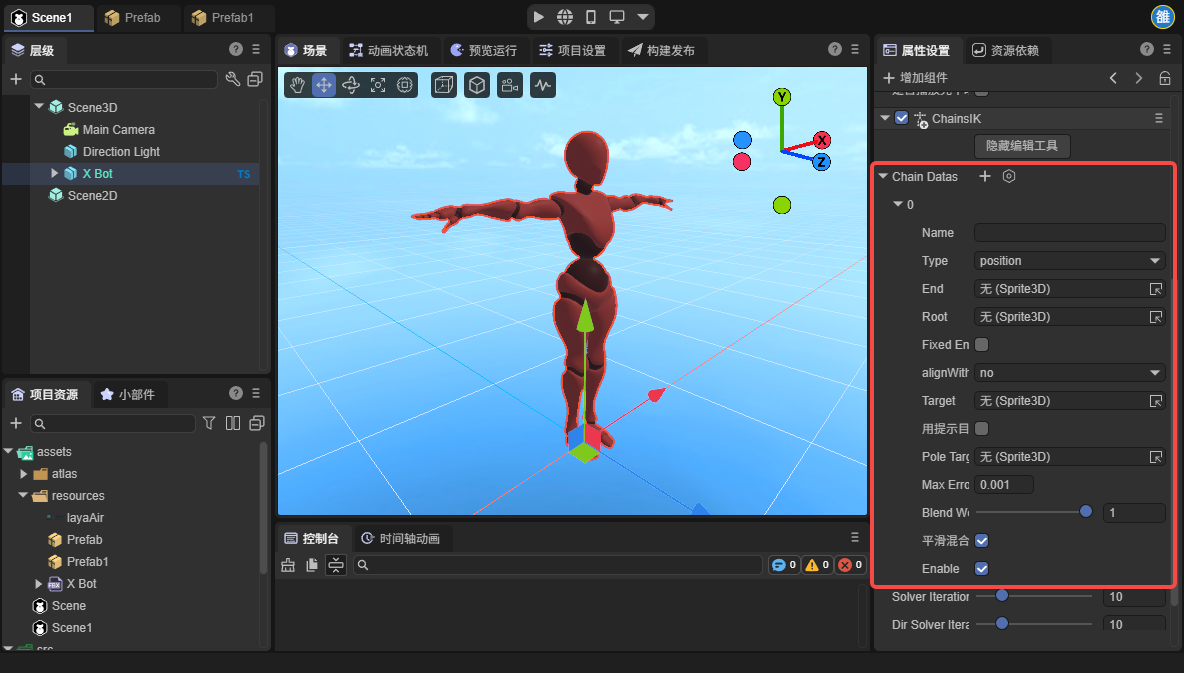
点击Chain Datas右侧的加号,创建一个Chain Datas实例。
创建后的内容如图所示:
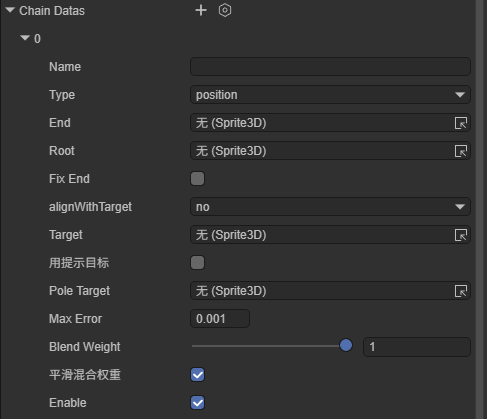
Name:骨骼数据的名称,由开发者自行定义。设置名称后可以通过IK组件上的getChain(name: string)方法获取对应的Chain。如果未设置,则默认使用end节点的name。
Type:类型。有position和lookAt两种。
position:位置模式。在此模式下,链的末端节点会尽可能到达设置的空间坐标。
lookAt:注视模式,在此模式下,链的末端节点不再尽可能到达目标空间,而是骨骼的z轴始终指向目标点。
End:IK链中最末端的节点,也是直接受控的部分。
Root:IK链中的最高级父节点。
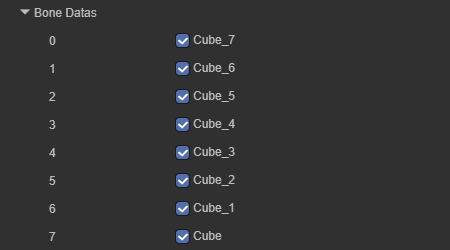
BoneDatas:骨骼数据。设置End和Root后,组件会自动检索这两个节点之间的节点,生成骨骼数据。只有勾选后才会进行IK计算。
FixEnd: 是否固定末端的父关节。勾选后倒数第二关节不参与计算。
alignWithTarget:末端朝向对其模式。
no:不对齐,进位置跟随。
y:Y轴对齐,常用于手部方向。
all:完全对齐,位置和旋转都匹配目标。
Target:目标对象。IK链将跟随此对象的位置/朝向。需要注意的是,Target不能设置为BoneDatas上的节点或其子节点,否则会引起错误。
enablePoleTarget:是否启用提示目标。
PoleTarget:提示目标。对于IK链而言,同一目标位置可能有多种关节配置,在Target的位置不变的情况下,关节既可以向左弯曲,也可以向右弯曲,在设置PoleTarget之后,关节会尝试朝向此对象,可以用于防止肘部/膝盖弯曲方向不自然。
MaxError:允许的最大误差。IK功能通过迭代算法来逼近目标,设置最大误差可以节省计算次数,提高性能。
blendWeight:IK混合权重。控制IK解算结果和动画数据的混合比例。值为0时IK完全失效,值为1时IK完全接管动画。
smoothBlendWeight:平滑混合权重。当blendWeight变化时,平滑过渡到新值。值越小,过渡越平滑,用于防止权重突变导致的跳变。
Enable:是否启用此数据链。
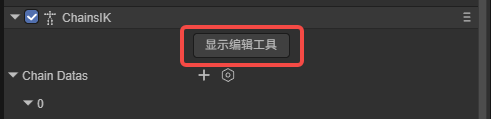
3.2 显示编辑工具
点击显示编辑工具后,属性设置面板中会显示出对应的属性。
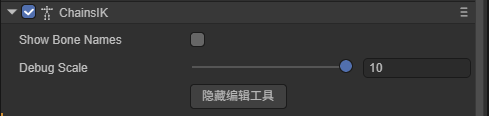
ShowBoneNames:显示骨骼名称,勾选后会在骨骼的起点处显示骨骼名称。
BoneNameScale:骨骼名称缩放。勾选ShowBoneNames后会显示,用于调整骨骼名称的大小。
DebugScale:缩放。控制骨骼链显示的大小,可根据需求进行调整。
场景中会根据节点的层级显示骨骼链,一般的骨骼链会以白色显示,以包含在ChainDatas中的骨骼链会以黄色显示。

ShowBoneNames:显示骨骼名称,勾选后会在骨骼的起点处显示骨骼名称。
DebugScale:缩放。控制骨骼链显示的大小,可根据需求进行调整。
3.3 其它属性
除了Chain Datas上的各种属性外,IK组件上还有一些属性。
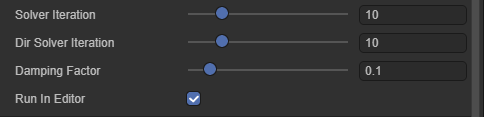
SolverIteration:解算器迭代次数。这个属性控制IK的最大求解次数,用于平衡求解的精度和性能。
DirSolverIteration:lookAt模式下的IK链的最大迭代次数。
DampingFactor:阻尼因子,控制求解的平滑度。值越小,运动越平滑但收敛越慢;值越大,响应越快但可能产生抖动。
RunInEditor:是否在编辑器中运行。
四、ChainsIK的使用
这里我们通过一个简单的示例,演示Ik的基础使用流程。
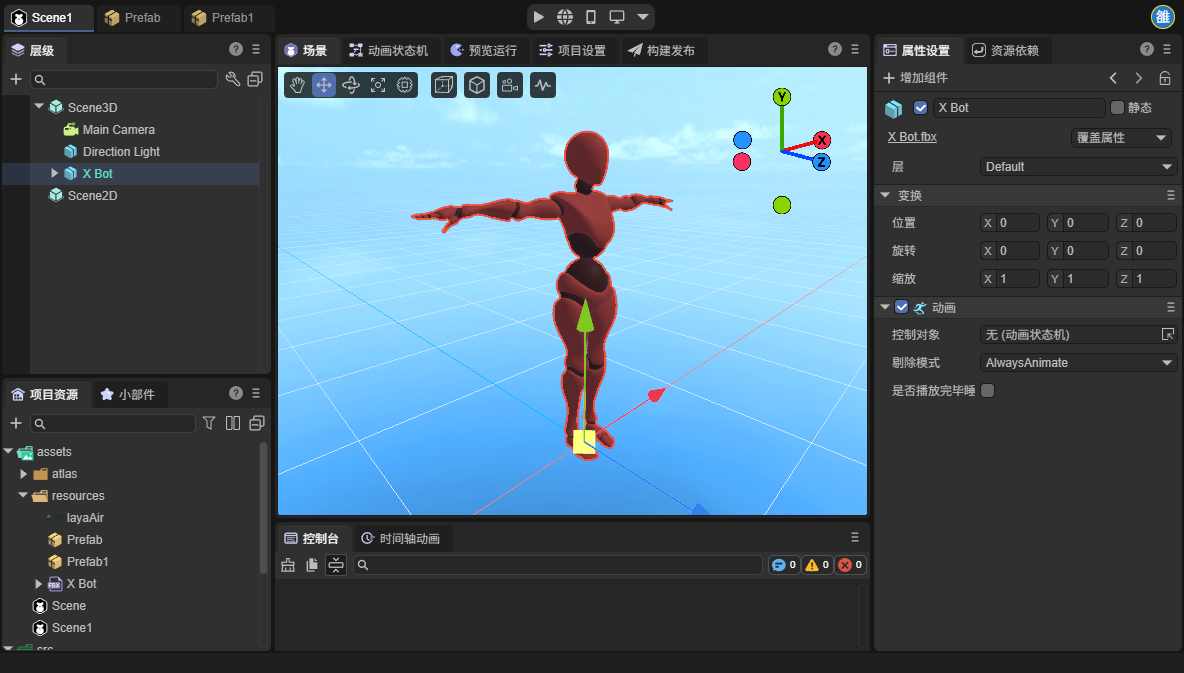
场景中添加一个基础角色模型。
接下来明确我们要的目标:通过IK功能控制角色的左臂的移动。
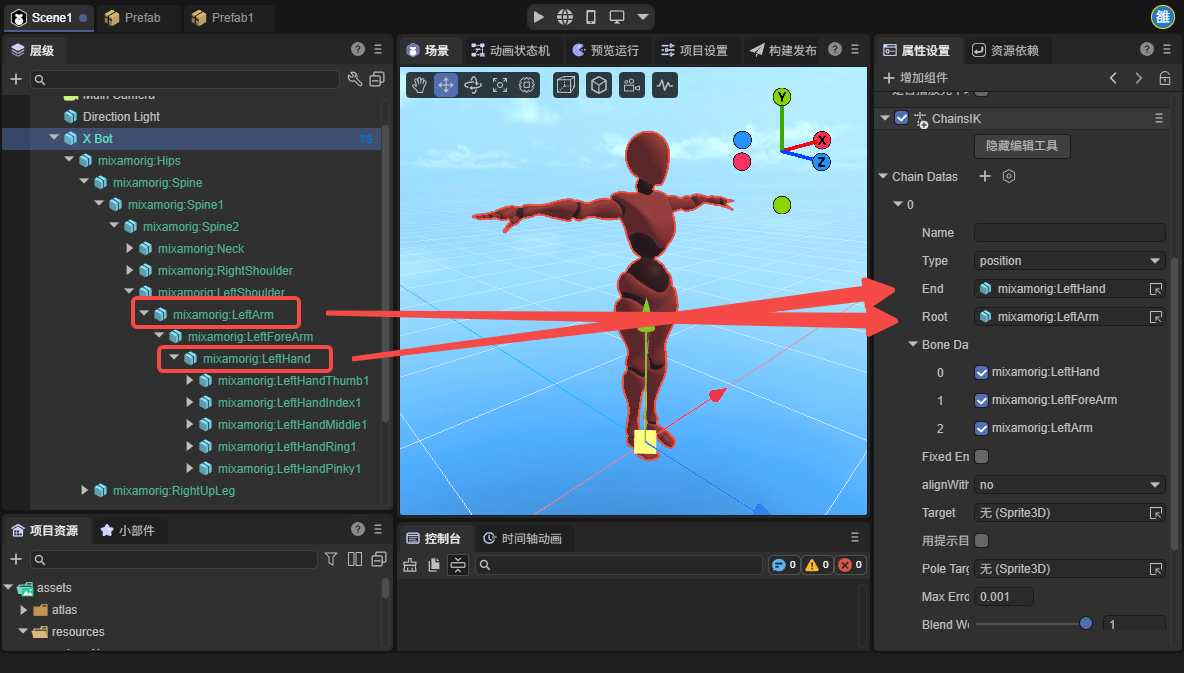
首先在角色的根节点上添加IK组件,并创建一个ChainDatas:
展开角色的节点层级,并找到角色左臂对应的节点,将左臂的根节点设置到Root上,这里我们不对手指的节点进行控制,因此骨骼链的末端节点为手掌节点。
在场景中添加一个节点作为目标节点,将这个节点移动到角色面前:
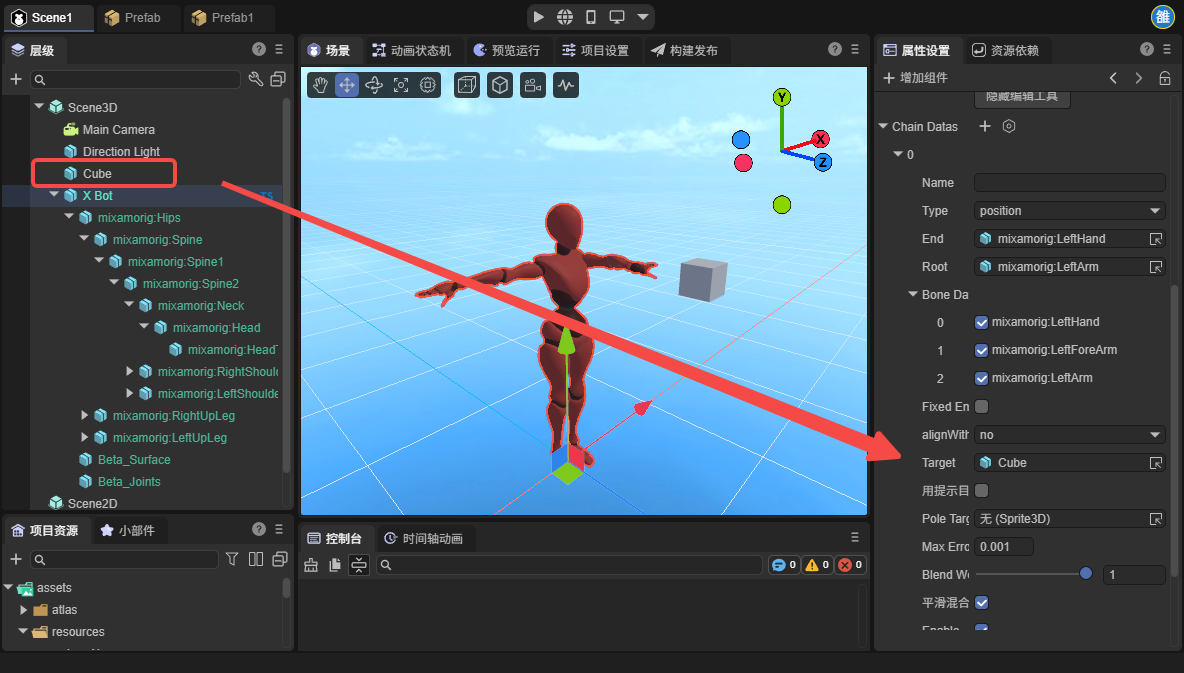
这里可以看到,角色的手臂已经有动作了,但手部的动作并不正常:
这是手掌节点作为末端节点没有被旋转导致的,我们可以通过添加一个空节点的方式解决这个问题。找到左手手掌对应的节点,在这个节点下添加一个子节点,将这个节点调整到手指指尖的位置:
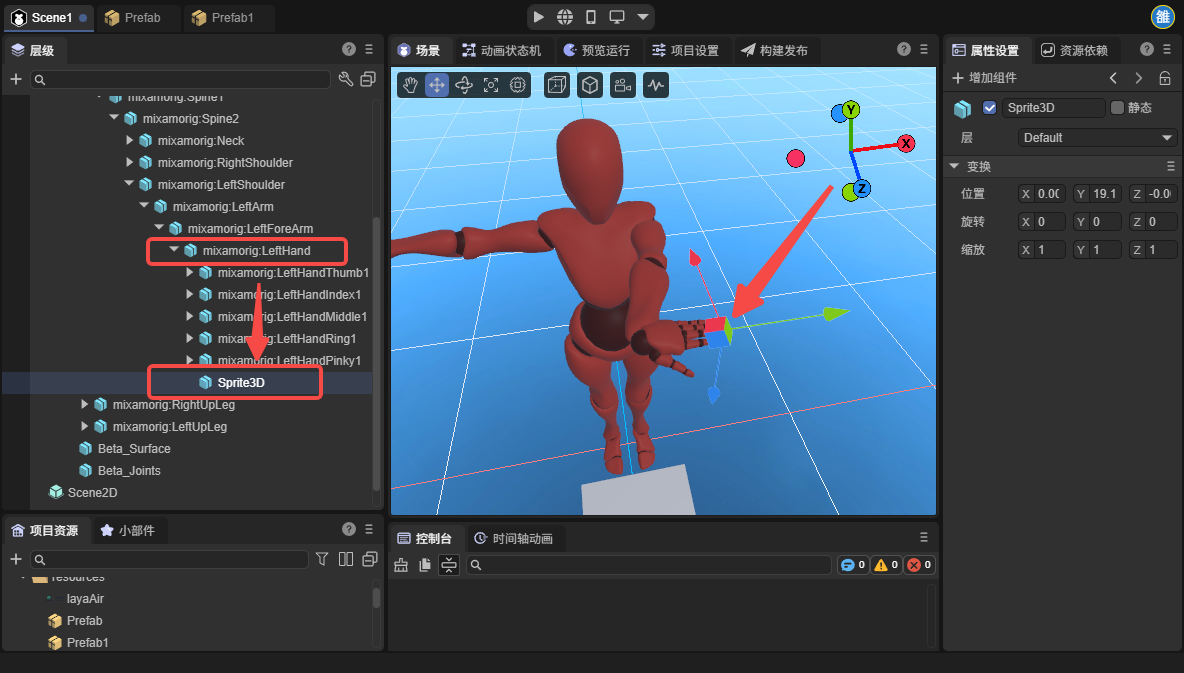
然后将这个节点设置为Ik的End节点:
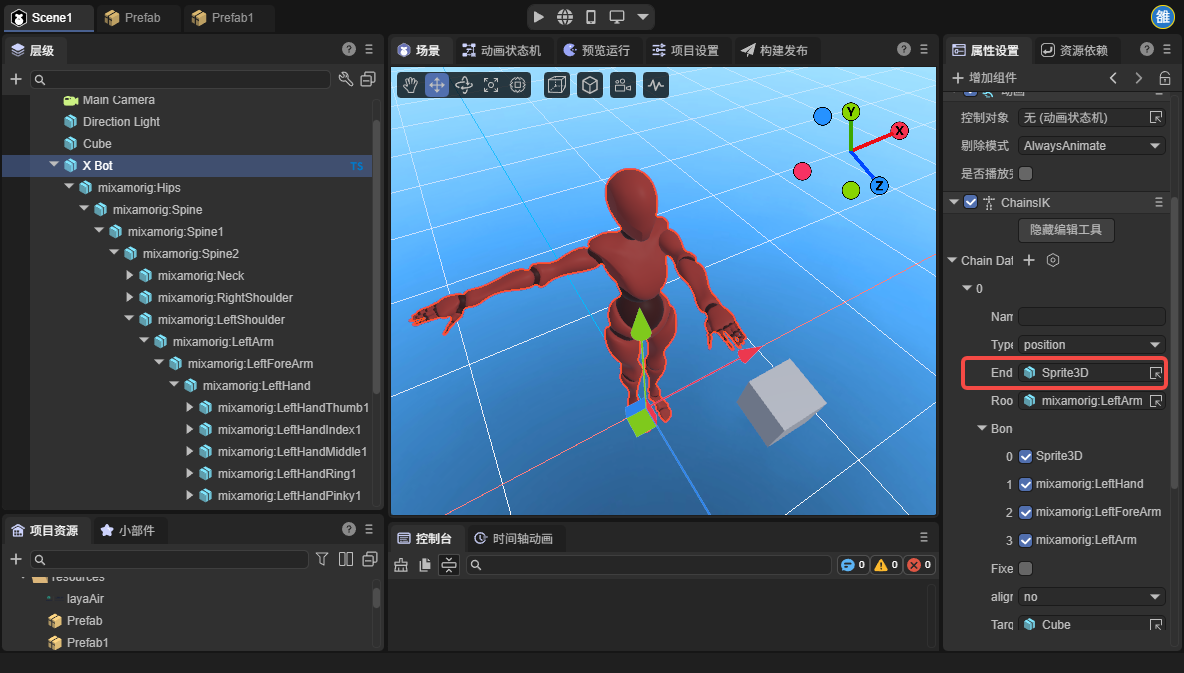
此时可以看到,手掌节点的效果恢复正常。